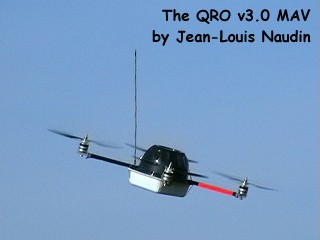
The QuadRotor Observer
(QRO) v3.0 created on december 28,
2006 - JLN Labs - Last update
February 5, 2007 Toutes les
informations et schémas sont publiés gratuitement ( Open
Source) et sont destinés à un usage personnel et non commercial All informations and
diagrams are published freely (Open Source) and are
intended for a private use and a non commercial use.
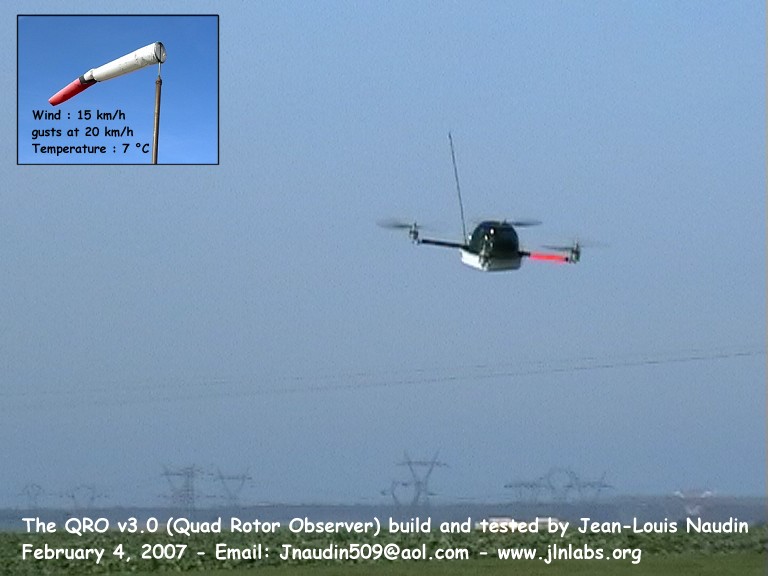
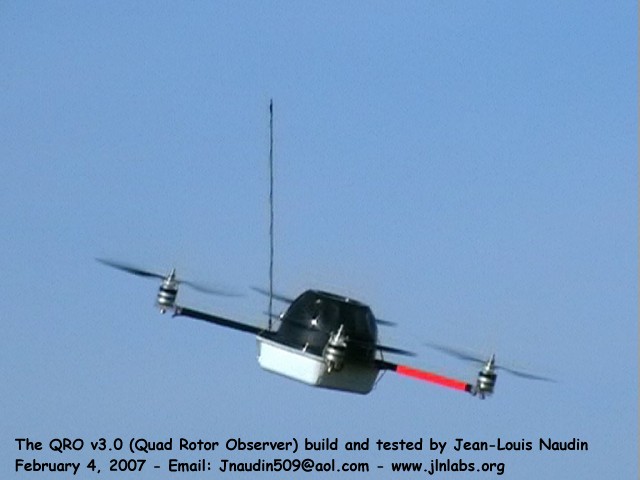
On February 4, 2007, the QRO v3.0 (with a
6DOF IMU onboard) has done successfuly its 1st outdoor test
flights.
Test flights weather conditions :Wind ( 15
km/h, gusting at 20 km/h ), temperature 7°C.
The QRO project is still in development
phase, some improvements are currently in process such as :
- adding of 3 magnetometers,
- a static and a dynamic pressure sensors,
- a GPS receiver for a full autonomous flight mission,
- an ultrasonic altiponder for the self landing and or recovery
procedure,
- a video and/or a photo camera,
- a full high speed transceiver for the datalink to the ground
station.